车联网仿真测试的研究与分析
本文论述车联网行业技术发展的趋势,介绍了车联网仿真测试的方法和内容,对车联网仿真工具和仿真建模进行了详细研究,并通过仿真案例说明测试的意义。随着互联网技术的发展与人们对网络化生活的需求,汽车智能化成为汽车发展的焦点,车联网正是实现智能汽车的一个重要技术手段。车联网将汽车技术与互联网技术高度融合。是实现智能交通的重要途径,也是未来智慧城市的重要环节。本篇论文以《车联网仿真测试的研究分析》发表在中国科技纵横 2019年08月下旬刊
前言
车联网是汽车、电子、信息通信、道路交通运输等行业的深度融合的新业态形式。2017年9月工信部发布的《车联网白皮书(2017)》对车联网的技术路线、关键技术、系统架构等方面都提供规划。2018年4月工信部、公安部和交通运输部三部委联合发布了《智能网联汽车道路测试管理规范》,该规范对智能网联测试的主体、车辆、测试管理等多个方面进行了详细规定。车联网技术越来越受到行业关注和深入研究。
车联网测试技术是车联网整个技术中验证、测试和性能评估的重要环节,测试车联网在各种实际场景中都可以安全、可靠和高效的工作。车联网测试的主要目标是评估车联网协议和应用性能,常用的测试方法现场运行试验(Field Operational Test,简称FOT)和仿真试验两大类。现场运行试验是最直观和有效的测试方法,但由于测试受成本因素、环境因素、可重复性、安全性和法律许可等多方面因素的制约,使得仿真技术在车联网测试评估中得到长足发展。本文将对车联网仿真测试的概念和内容进行介绍,对车联网仿真测试仿真工具和仿真建模标进行详细研究和分析,并列举测试案例。
1 仿真测试内容与方法
1.1 概念和策略
1.1.1仿真测试介绍
仿真测试是选用一种编程语言,通过编程方式实现测试模型、定制运动环境和测试指标三个部分。
通常选型的编程语言或平台被称之为仿真工具。仿真工具是仿真测试基础,对测试的时间效率、数据精确度和模型建立的容易程度影响最大。车联网仿真平台主要由网络仿真工具和道路交通仿真工具组成。
车联网仿真模型车辆运动仿真相对于人类移动模型更复杂和难以重现,车辆移动仿真需要体现车辆跟随状态,变车道超车状态,复杂交汇路口等状态。需要建立和反映人类行为的模型,如驾驶员对交通信号灯的反应及反应时间;车辆之间通信受到大型建筑物及周边车辆的干扰和限制。
仿真测试指标的合理性、可比性和可重复性也是仿真测试中一个重要问题。车联网的多业态融合性使其复杂度和冗余度大大升高,使得仿真试验的可比性和重复性变的非常难以实现。
1.1.2 仿真测试的影响因素
仿真测试是对客观自然世界的抽象化和模型化,其测试结果的准确收到诸多因素的影响,其中主要的几个影响因素包括:车辆移动模型、通信信道模型和车辆间通信(Inter-Vehicle Communication,简称IVC)的模型。
1.2 仿真软件
车联网仿真主要由网络仿真工具和道路交通仿真工具两类组成。
1.2.1 网络仿真
网络仿真工具采用离散时间仿真方式(Discrete-event Simulation,简称DES),仿真器提供有序的预定时间序列,每个时间被安排在特定的仿真时间进行触发,触发通常改变仿真的状态和触发相应规划的新事件。事件可以代表设置的任何事件,例如: 车辆正在接受交通灯控制器的信息,或电信号从0V到5V的电压水平。
网络仿真中的三种主流仿真器分别是ns-3、OMNeT + +和JiST。表1网络仿真器一览表对网络仿真器的程序语言、默认模型库和编程语言等进行行了介绍。
ns-3是历史最悠久的仿真器,ns-3没有是没有集成开发环境和图形处理环境,仿真器数据记录到存储器后,利用网络动画工具和Wireshark对运动轨迹进行可视化模拟再现。ns-3典型特征是可以无缝被测试平台或者整合测试平台。
OMNeT + +的开发始于1992年,是一款开源付费软件。OMNeT + +是搭载可选的集成开发环境的完整仿真环境,支持手动编写模型代码、批处理模式和图形界面的运行方式等,OMNeT + +最新版本发展到目前是V4.6,典型的OMNeT + +模型库的例子有用于精确多信道多技术物理层建模的MiXiM,融合网络仿真的Over-Sim及车载网络仿真的Veins工具。
表1 网络仿真器一览表
| 程序引擎 | 语言 | 模型库 | 编程语言 |
| ns-3 | C + + | ns-3 | Python |
| OMNeT + + | C + + | INET | C + + |
| JiST | Java | SWANS | Java |
JiST是三个网络仿真测试工具中发展最晚的,JiST是Java in Simulation Time的简称,开发用来作为SWANS无线自组织网络仿真器的基础。
1.2.2 道路交通仿真
道路交通仿真的软件根据测试所需要的颗粒度,提供相应的模型,包括构造运动模型约束,交通模型等。道路交通仿真工具主要按照时序步进的方法,以固定的时间增量推进仿真测试的进程,车辆的运动状态、交通信号灯控制器状态和道路状态都会随时序不断计算更新。
目前存在的较成熟的道路交通仿真器有SUMO、Vissim、PARAMICS、TransModeler、TRANSIM等。最常用的两款软件是SUMO和Vissim。
SUMO(Simulation of Urban Mobility的简称)是车联网研究中最热门的道路交通仿真工具包。SUMO诞生于2000年,其界面如图1所示,软件采用EPL(Eclipse Public License )公共许可协议的开源软件,目前SUMO逐渐发展成为一个多模式仿真工具包,包含了交通仿真引擎、综合网络生成工具。SUMO最吸引测试用户的基于GUI图形界面下的微观交通仿真器,研究人员可以对仿真测试运行中的道路数据交互修改。该软件还支持IDM(Intelligent Driver Model的简称)、Kerner三相模型和Wiedemann模型等不同汽车运动模型的选择。

图1 SUMO 仿真工具界面截图
Vissim是一款运行在Windows平台上的交通仿真工具,其开发仿真界面如图2所示,Vissim的微观交通仿真器是基于Wiedemann的汽车运动模型,并对其进行完善和扩展后的多模式仿真工具。同时,Vissim可以模拟车辆可视度和人类感知与单个行人的运动仿真。Vissim支持图形化编辑、需求建模、网络和模型的导入、2D/3D仿真视频渲染等功能。

图2 Vissim集成开发界面截图
2 IVC仿真平台
IVC网络仿真平台都是基于网络仿真工具和道路交通仿真工具建立起来的,不同的平台对两种仿真工具的深度耦合采用不同的解决方案,目前一般根据耦合结构将网络仿真平台分为分离式、嵌入式、双耦合式和集成式四类。
下面我们介绍双耦合式IVC仿真框架中最为成功的三个平台:Veins、iTetris和VSimRTI。
2.1 Veins
Veins(Vehicle In Network Simulation的简称)仿真框架的结构如图3所示。

图3 Veins仿真平台框架图
Veins基与1.2.1的网络仿真工具OMNeT + +和1.2.2道路交通仿真工具SUMO。OMNeT + +调度仿真执行控制、数据信息采集和测试事件,其基于MiXiM的模型库提供电磁波的DES抽象,提供多通道多方式传播的干扰影响。Veins支持IEEE IVC栈协议模型、模拟ETSI ITS-G5协议栈信道模型、IEEE 802.11p、IEEE 1609.4DSRC/WAVE、集成蜂窝网络模型库。Veins允许网络交通和道路交通双向耦合,通过SUMO提供多种车辆移动模型,SUMO的TraCL服务器运行测试实例与Veins进行实时交互,保证移动仿真移动模型的实现。
2.2 iTetris
iTetris是在欧盟FP7研究项目(Integrated Wireless and Traffic Platform for Real-Time Road Traffic Management Solutions)的背景下开发的仿真平台。软件采用免费开源的方式发布。iTetris是由四个耦合的功能模块共同组成的IVC测试平台,它们分别是:中心控制系统iCS、网络仿真工具ns-3、道路交通仿真工具SUMO和应用管理程序iAPP。iTetris框架结构如图4所示。
iCS实现应用层iAPP与ETSI ITS设备层、仿真组件的数据采集、缓存和转发。iTetris仿真器扩展了IVC特定信道的模型、ETSI ITS层的定制模型、车辆的排放模型、ADAS模型,支持IEEE 802.11P、WiMAX等多种无线网络通信协议。

图4 iTetris仿真平台框架图
2.3 VSimRTI
VSimRTI(V2X Simulation Runtime Infrastructure的简称)提供了一种更新颖的解耦组件仿真框架。如图5所示,VSimRTI仿真框架围绕一个轻量级核心结构构建,管理所连接的仿真器同步、生命周期、数据交互等。VSimRTI开发的目标是提供一种耦合领域特有仿真器的通用框架,为更多仿真工具提供接口组件,如Vissim、SUMO、OMNeT + +、ns-3和JiST/SWANS的接口组件。可以对道路车辆运动、蜂窝网络LTE、V2X仿真做到很好的支持。

图5 VSimRTI仿真器样例
3 仿真建模
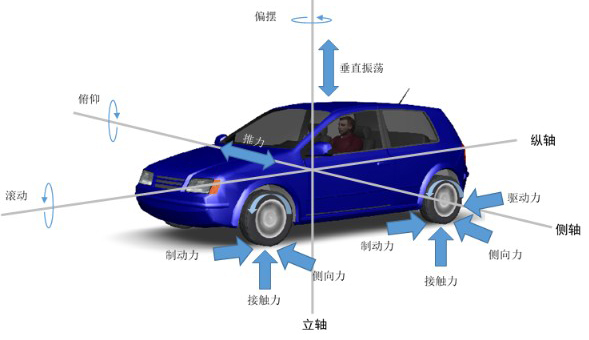
3.1 车辆移动建模
车联网仿真很难建立一种数学模型来准确描述道路网络中车辆的移动方式。经过多年的研究发现道路交通科学有很好的车量移动模型,在车联网仿真中我们主要聚焦与道路交通的微观模型,即准确描述事件中每一辆车的移动行为。本文主要研究车载自组织网络VANET(Vehicular Ad-hoc Network的简称)的移动模型,VENET移动建模的发展时间从世纪90年代到目前主要经历了四个阶段:随机节点运动、真实车辆轨迹、道路交通微观仿真和双向耦合仿真。
典型VENET的移动建模架构图如6所示,图中包括所有上述四种移动模式。

图6 用于VENET协议和应用仿真的建模技术
3.1.1 随机节点运动
为了简化运动模型,研究初期假定运动节点是一个完全随机的方式无约束运动,随机节点移动模型大量应用在MANET(Mobile Ad-hoc Networks的简称)仿真中。现在测试证明,随机节点移动模型与更先进的车辆运动模型仿真结果相差非常大,甚至在有些测试中无法达到测试稳态,现在精确的仿真很少采用随机节点运动模型。
3.1.2 实际移动轨迹
实际移动采用的是实际运动真实车辆的运动轨迹应用到仿真中,车辆运动轨迹的数据主要来自城市公共交通、大型货车车队、出租车应用中心、GPS导航系统的服务商等,他们将多年记录的车辆运行轨迹进行处理后,公布给研究机构作为真实的仿真测试数据。
实际移动轨迹在仿真中按照设定时间,将轨迹数据更新到仿真场景中,这种数据在网络仿真中产生与现实运动最为相符的车辆移动数据。但是由于可被利用的轨迹都属于相对特殊的车辆,数量有限,不能真实反映路上所有车辆的轨迹,所以应用也受到很大的限制。
3.1.3 微观移动仿真
微观移动模型主要是以单个车辆为单位,采用车辆运动仿真工具进行仿真,其移动仿真的真实性主要由所选用的仿真器的复杂度和精确度所决定。如:简单的无碰撞节点移动模型和基于功能齐全的多智能体移动仿真工具。
微观移动仿真的优点是能够模拟非常真是的运动轨迹,移动参数可以根据测试目的自由调整。但在很多自组织网络VANET框架仿真中微观移动仿真也是难以实现测试。例如:节点运动影响网络的连接,进而影响网络中的交通,反过来网络交通也会对节点运动产生影响,一旦反向影响产生,立刻使已经完成的计算和轨迹失效。
3.1.4 双向耦合仿真
在前面三种模型不能满足的条件下,需要建立道路交通仿真和网络交通仿真双向交流的耦合仿真工具。这就是上文所述的双向耦合仿真平台。双向耦合仿真不仅对网络交通的影响及网络交通的反馈作用有更精细的仿真测试,而且不受仿真运行时间的制约和影响。
VANET双向耦合仿真时,网络仿真工具和道路交通仿真工具同时运行,不断的双向传递数据和参数,进程相互依存,主要有两个相互交替的阶段构成。一种是网络仿真器运行时,它实时将参数变化传送到道路交通仿真器,改变驾驶人驾驶行为或道路特征,从而改变车辆的运动决策路径。另一种是道路交通仿真利用网络仿真器传递的新参数进行交通运动计算,并将车辆运动数据更新到网络仿真器。
3.2 信道模型
3.2.1 自由空间模型
自由空间传播模型是假定无线电波在没有阻挡、没有衰减、单一途径的理想状态下传播,自由传播空间传播模型中无线电波的损耗只和传播距离d和电波频率λ有关系,由此得到自由空间模型的路径损耗模型如公式为
L_freespace [dB]=20log_10 (4π d/λ) (1)
式中L_freespace为自由空间路径损耗;d为传播距离;λ为电波波长;
自由空间模型的经验校正引入一个额外依赖于环境的路径损耗指数α来考虑非理想的信道条件。这就是著名的Friis模型如公式为
L_(emp-freespace) [dB]=10log_10 (16π^2 d^α/λ^α ) (2)
式中L_(emp-freespace)为校正自由空间路径损耗;d为传播距离;λ为电波波长;
3.2.2 双射线干涉模型
双射线干涉模型是一种更接近实际的无线电传播模型,它考虑了无线信号至少存在地面反射信号的干涉。一束地面反射后的无线电波束如图7所示,直接视线传播路径长度d_los和地面反射的间接的视线路径长度d_ref如公式为
d_los=d^2+(h_s-h_r )^2 (3)
d_ref=d^2+(h_s+h_r )^2 (4)
式中:dlos 直接的视线传播路径长度;dref为经过地面反射的间接非视线的间接路径长度;d为发射器和接收器之间的距离;hs为发射器的天线高度;he为接收器的天线高度;
根据d_los和d_ref差异计算得出干扰射线的相位差φ公式为
φ=2π (d_los-d_ref)/λ (5)
式中:φ为干涉相位差;λ为电波波长。

图7 双射线干涉模型图
反射偏振电磁波的衰减系数Г,反射系数依赖于一个固定的ε_r,而且还主要依赖于入射角度ϴ_i。再根据发射器和接收器的高度、距离,计算入射角度的正余弦值,得出衰减系数Г的公式为
Г=sin〖ϴ_i-√(ε_r-cos^2〖ϴ_i 〗 )〗/(sin〖ϴ_i 〗+√(ε_r-cos^2〖ϴ_i 〗 )) (6)
最后,我们得出由于相长干涉和相消干涉引起的信号强度相对变化可以通过对公式(1)修正得到,双射线干涉路径损耗模型公式为
L_tri [dB]=20log_10 (4π d/λ |1+Г e^iφ |^(-1) ) (7)
式中L_tri为双干涉路径损耗;
双射线干涉模型在仿真项目初期的车联网仿真中可以简化模型,同时还要将精度保持在尽可能的容忍范围内。在理想的偏振和反射假设下,大距离d时的视线和反射信号之间的相互干涉的计算简化公式为
L_tri [dB]=20log_10 (d^2/(h_s h_e )) (8)
3.2.3 建筑物和车辆遮蔽模型
实际道路仿真中我们需要考虑建筑物和其它车辆引起的无线信号遮蔽的影响。这种情况下的模型就是无线信号遮蔽仿真模型。初期遮蔽模型采用随机模型,典型是使用对数正态分布的遮蔽模型,随机遮蔽模型的仿真精度及测试的重复性不可控制,遮蔽模型目前采用了更为精确的构造几何形状遮蔽模型,典型的是采用导入显示世界的地图,例如导入OpenStreetMap的建筑物外墙数目及建筑物尺寸数据,在IVC仿真中为建筑物及相应的无线信号遮蔽建模。
2011年来自美国卡耐基梅隆大学Mate Boban等人最先评估了其它车辆引起的无线电信号遮蔽的影响。研究证明了车辆阻挡无线电通讯影响是不可忽略的,并建议为IVC制定一个考虑车辆影响的通讯协议。经过近几年的研究最先进的车辆遮蔽采用相似技术,对于一对车辆οs和οr之间的每一次信号传递,需要确定与它们直接视线相交叉的车辆,将这些所有交叉车辆点存储为{ο1,ο2 ,…},并将其相似于寻找阻碍建筑的问题,问题被转换为红蓝交叉的问题,从而大大简化减低了仿真计算的复杂度问题。
4 仿真案例
仿真工具的成熟和多种优点,使得车联网运营者、车辆制造商、道路规划者、交通管理者等在项目研究者越来越多的使用仿真工具进行项目验证和试验,下面我们介绍两个仿真工具的应用案例。
4.1 Veins动态路径规划
道路规划的研究者为了评测VANET在城市智能交通动态路径[14]的效果,采用仿真工具Venis对西安交通地图建模,在场景中完成车辆间通讯仿真,实现VAENT的动态路径规划仿真设计。
试验中选用OMNet++提供网络通讯仿真工具, SUMO提供微观的道路交通仿真,仿真中设定人的反应参数以体现真实城市交通状态仿真。 仿真中设定“事故节点”测试事故发生后指定路径上的车辆节点的动态规划路径效果。
测试结果验证了交通安全服务协议在VANET中的有效性,并有效提高平均车辆行驶速度和缓解拥堵。

4.2 Veins车路通信仿真
试验场景由两条限速为80km/h的平行车道支持单车单主干路,该主干路限速100km/h,所有道路均以阶梯形式连接。仿真中在主干路设定一起事故。IVC系统下,车辆间互相通知有关事故发生后道路的拥堵状况,拥堵信息成功传送到一辆跟随车辆中,车辆可能会利用平行道路重新规划路线行驶。试验中,为了评估两个指标重新规划路径的合理性,对车辆的制动距离和绕行距离进行了合理修正。
试验结果显示,IVC的启用,在拥堵停车距离超过临界点后具有明显的减少行车时间和降低CO2排放的效果,但是这种优化效果是对整个系统而言的,对于单个微观车辆却不一定是最优的效果。
结 论
车联网作为国家发展和学科重点,是构建智城市、智能道路、智能车辆的重要保证。仿真测试的方便性、安全性、可重复和低成本等优点使其成为车联网测试的一种常规手段,在几十年车联网研究发展中起到举足轻重大的作用。本文对车联网仿真测试研究的内容、仿真工具、仿真模型和简单的仿真案例进行了研究。得出结论:双耦合式的仿真平台在车联网仿真测试中效果最优,微观的车辆移动模型、基于建筑物和车辆遮蔽的信道模型是科学性、客观性和精准性是最优的。
参考文献
Barceló J. Fundamentals of traffic simulation[M]. New York: Springer, 2010.
Behrisch M, Bieker L, Erdmann J, et al. SUMO–simulation of urban mobility: an overview[C]//Proceedings of SIMUL 2011, The Third International Conference on Advances in System Simulation. ThinkMind, 2011.
Heinovski J, Klingler F, Dressler F, et al. A Simulative Analysis of the Performance of IEEE 802.11 p and ARIB STD-T109[J]. Computer Communications, 2018, 122: 84-92.
Dwivedi U, Upadhyay A R. Vehicle to vehicle communication in vehicular network simulation environment: Analysis and future perspectives[J]. Journal of Network Communications and Emerging Technologies (JNCET) www. jncet. org, 2018, 8(2).
肖玲,李仁发,罗娟.车载自组网的仿真研究综述[J].系统仿真学报,2009,21(17):5330-5335+5356
王润民,邓晓峰,徐志刚等.车联网仿真测试评价技术研究综述[J/OL].计算机应用研究,2019(07):1-9[2019-04-28].
王丹,孟强.基于Veins平台的VANET动态路径规划仿真设计[J].电子技术与软件工程,2016(15):101.
王晓萌,刘松云,李鑫等.基于Veins平台的交通信号灯智能控制仿真研究[J].信息通信,2016(10):61-62.
张国强,王媛媛,王涛等 微观交通仿真基础[M]. 2017.
王丹,孟强.基于Veins平台的VANET动态路径规划仿真设计[J].电子技术与软件工程,2016(15):101.
王旭东1, 李国栋2
[摘要] 简述车联网行业技术发展的趋势,介绍了车联网仿真测试的方法和内容,对车联网仿真工具和仿真建模进行了详细研究,并通过仿真案例说明测试的意义。
关键词:车联网;车辆间通信;SUMO;VEINS
Research and analysis of internet of vehicles simulation test
Wang Xudong1, Li Guodong2
[Abstract] A brief introduction to the trend of technology development in the Internet of Vehicles industry. The method and content of Internet of Vehicles simulation test are introduced. A detailed study of vehicle networking simulation tools and simulation modeling was conducted. The meaning of the test is illustrated by a simulation case.
Keywords: Internet of Vehicles;Inter-Vehicle Communication;SUMO;VEINS
版权声明:本文为原创文章,版权归donstudio所有,欢迎分享本文,转载请保留出处!